Using Transformation Matrices with Point Clouds

When working with large point clouds, particularly those from our FARO Focus S 350 long range scanner, it is often necessary to modify the existing point cloud to align or organize the data. For example, scans from the long range scanner are translated and rotated in all six degrees of freedom to align to one another and create a contiguous point cloud. To do this, a transformation matrix is applied to the data.
Transformation matrices are a combined representation of all transformations applied to a set of data. Put simply, they represent all translation, rotation, scaling, skewing, reflection, and orthogonal projection performed on the data! These matrices ensure that transformations of data are presented in a consistent format across disciplines of study, software, and computation techniques.
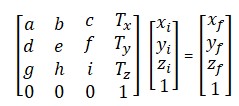
Transformation matrices are a complicated topic, and require more explanation than what would fit in this blog post. I recommend consulting a linear algebra textbook if you would like to learn more! Staying application focused in this post, transformation matrices for point clouds are typically displayed as 4 x 4 matrices, such as this one from Polyworks:
![]()
The rightmost column represents translation of the matrix in X,Y, and Z, with a placeholder dimension for normal vectors in the fourth row. More generally:
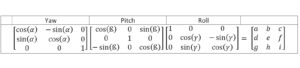
The upper left 3 x 3 of the matrix (letters a-i) then represents combined yaw, pitch, and roll of the matrix. These are presented below both separated for clarity and combined:
One incredibly useful takeaway from this is that these transformations can be reversed by applying the inverse of the transformation matrix! Additionally, the equations above can be used to back calculate the translations and rotations that have already been applied to a matrix! This exact process was recently applied to diagnose and solve an error in an automated alignment, bringing the transformations from Polyworks into FARO Scene!
Sources and credits for the explanations above!
Gentle, James E. (2007). “Matrix Transformations and Factorizations”. Matrix Algebra: Theory, Computations, and Applications in Statistics. Springer. ISBN 9780387708737.
“Rotation”, Encyclopedia of Mathematics, EMS Press, 2001 [1994]


Leave a Reply
Want to join the discussion?Feel free to contribute!